지난 TX16S 화면 꾸미기에 이어 미니 기체 바인딩 첫 번째 포스팅입니다. ㅎ~
처음으로 세팅할 기체는 Eachine H8 mini 드론입니다.

인도어 용으로는 상당히 괜찮은 드론입니다. 가벼워서 견적도 거의 안 나고 ㅎㅎㅎ

예전에는 Devo7 송신기에 멀티모듈(NRF24L01) 납땜하고 했었는데 ㅎㅎ 이제는 OpenTX 하나면 끝이군요 ^^
송신기의 기본적인 조작은 가능한 상태에서 따라 하셔야 쉽게 하실 수 있습니다. ^^
화면 꾸미기는 아래 이전 포스팅을 참고하세요~~
TX16S 기본 설정 및 화면 꾸미기
지난 TX16S 펌웨어 업데이트에 이어 이번에는 기본 설정 및 위젯을 이용한 화면 꾸미기(커스텀 메인화면)입니다. 가장 기본적인 버튼의 조작법은 알고 있다고 가정하고 작성합니다. 부팅 화면은
junghwan.net

각 모델의 이미지는 송신기 SDCARD의 IMAGE 디렉터리에 복사해 주시면 됩니다.
이미지의 크기(해상도)는 192x114(가로 x 세로) 픽셀이 가장 적당합니다.



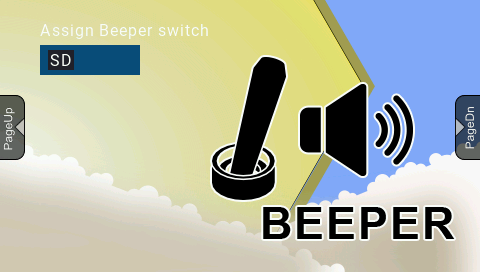
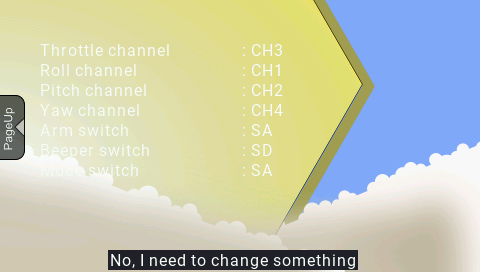
기본적으로 시스템에서 사용하는 스위치를 할당해 두었습니다.
H8mini 에서는 SF(THR-스로틀 컷)과 SG(MOD-모드:노말/레이트)를 사용합니다.
설정 방법은 상단에 링크해둔 [TX16S 기본 설정 및 화면 꾸미기] 포스팅을 참고하시면 됩니다.




새롭게 추가할 기체가 드론이므로 쿼드콥터를 선택합니다.
만약 펌웨어를 최신 버전으로 업데이트하지 않았다면 글라이더와 비행기만 있을 수 있습니다.
펌웨어를 업데이트하지 않은 상태로 모델을 추가하고 싶다면 비행기(Plane)를 선택하면 됩니다.
** 비행기로 선택 시 - 에일러론:1개, 플랩:없음으로 설정하시면 됩니다.






모델 생성이 설정한 대부분은 모델 설정에서 수정할 수 있습니다.


상단에 링크해둔 [TX16S 기본 설정 및 화면 꾸미기] 포스팅을 참고하셔서 화면을 설정해 줍니다.

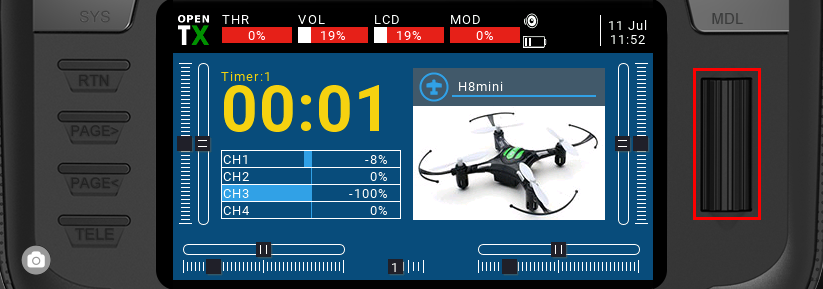
자~ 이제 화면 설정은 다 되었으니 H8mini 바인딩 및 모델 설정을 하겠습니다.




[THs]는 스로틀이 -100보다 클 때만 카운트됩니다.
타이머 이름을 비행시간이라는 뜻으로 "FLY Time"라고 설정했습니다.
리셋 방법은 수동 리셋으로 선택하고 SE 스위치에 리셋을 할당했습니다.
1분 단위 콜을 선택하고 음성안내로 설정했습니다. (저는 타이머 1개만 사용합니다. ^^)
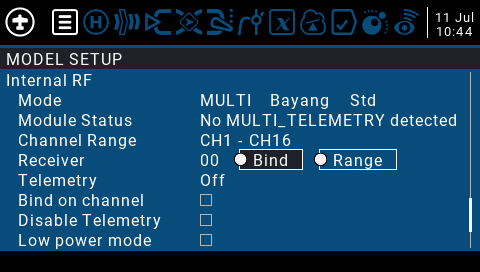
타이머 설정 후 아래쪽으로 스크롤하면 [InternalRF] 항목이 있습니다.
모듈은 [MULTI]로 선택하고 프로토콜은 [Bayang][Std]로 선택합니다.
(H8mini 기본형 제품은 텔레메트리를 지원하지 않으며, Telemetry 옵션이 체크되어 있으면 바인딩되지 않습니다.)
중요! 처음 바인딩을 하시면 꼭 센서 초기화(캘리브레이션)를 한번 해주셔야 합니다.
아래는 바인딩 및 Calibration 영상입니다.
바인딩이 완료되었으면 나머지 설정을 확인합니다.
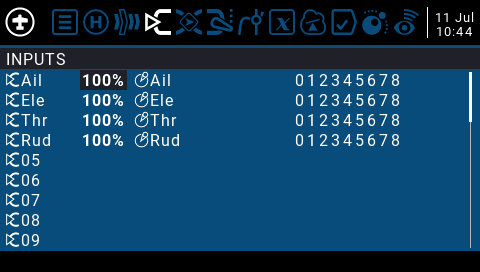
저는 에일러론 트림이 좀 안 맞아서 INPUTS에서 오프셋 값을 좀 줬습니다.
크립으로 수정해도 되지만 여기서 오프셋을 입력해도 됩니다.
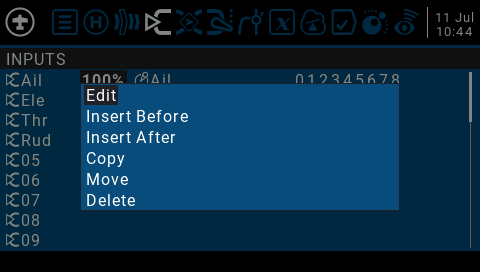
[Ail]에서 스크롤 휠을 길게 누릅니다.


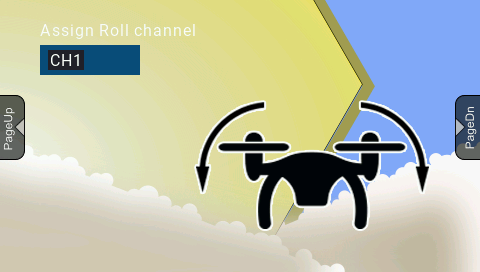
리버스가 필요한 채널이 있으면 위 이미지에 선택된 화살표(Direction)의 방향을 변경하면 됩니다.
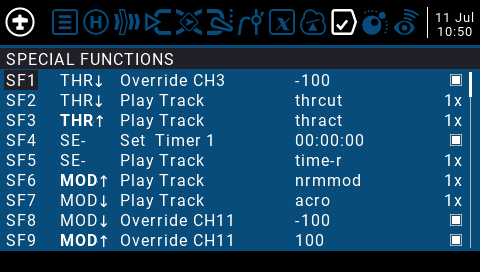
스페셜 펑션을 설정합니다.
* 설정 방법은 상단에 링크를 걸어둔 [TX16S 기본 설정 및 화면 꾸미기]를 참고하세요~
- SF1 : 스로틀 스위치(SF)가 내려와 있으면 스로틀(3채널)을 -100으로 설정
- SF2 : 스로틀 컷 음성안내
- SF3 : 스로틀 활성 음성안내
- SF4 : 타이머 리셋 (이전에 설정한 수동 리셋 스위치)
- SF5 : 타이머 리셋 음성안내
- SF6 : 노말 모드 음성안내
- SF7 : 아크로 모드 음성안내
- SF8 : 노말 모드 설정 (H8mini 채널11에 -100을 설정하면 됨)
- SF9 : 아크로 모드 설정 (H8mini 채널11에 100을 설정하면 됨)
아래는 멀티 모듈 사이트 설명

헤드리스 모드는 필요가 없어서 설정을 하지 않았지만. 오토 플립은 아무리 해도 동작하지 않더군요.
해외 유투버 들도 동작하지 않는다고 이야기하더군요. (전용 송신기로는 가능하긴 한데)
아래는 호버링 테스트 영상입니다.
테스트 후 느낀 점은..
제품에 포함된 완구 송신기와는 비교할 바가 아니고...
예정에 Devo7 송신기에 멀티 모듈 달아서 조종했을 때보다 훨씬 키감이 좋네요 ㅎㅎ
RATE 모드로 변경하고 나면 키웍에 반응을 바로바로 해서 민첩하게 움직이네요 ^^
RATE 모드를 기본으로 사용하는게 좋을 것 같습니다. (노말모드는 왠지 굼뜨게 느껴지네요 ㅎㅎ)
그런데 H8mini 의 RATE 모드는 완전한 RATE(ACRO)모드가 아니고, 레티튜드 정도 입니다.
(동작이 민첩해 지지만 일정각도 이상 넘어가지 않는 상태)
참고로 동작 모드는 대충 다음과 같습니다. (GPS모드 제외)
1. Attitude Mode : 노말모드, 센서(가속도, 지자계 등)들이 보정해 주는 모드
2. Rattitude Mode : 지금은 거의 안쓰는 추세지만 Atti 와 Rate 의 중간
*일정 각도 까지는 Rate처럼 동작하지만 그 이상 넘어가지 않음. 즉, 플립은 안됨
3. Rate Mode : Acro(아크로)모드라고도 하며, 보통 FPV 레이싱 드론 비행시 사용하는 모드
'RC' 카테고리의 다른 글
| TX16S + Graupner Alpha 110 바인딩 (0) | 2021.08.14 |
|---|---|
| TX16S + URUAV UR65 (플라이스카이 수신기 버전) 바인딩 (0) | 2021.07.31 |
| TX16S 기본 설정 및 화면 꾸미기 (2) | 2021.07.05 |
| TX16S 사용 준비 (PC연결 및 펌웨어 업데이트) (22) | 2021.07.04 |
| 라보 트럭 (WPL D12) 모터 소음(부밍음) 제거 (0) | 2021.07.03 |




댓글